




Hey!
Op deze pagina wil ik graag meer vertellen over mijn zelfgemaakte robot genaamd Wall-E. De robot is geinspireerd door de robot uit de film Wall-E. Hoewel het project nog lang niet klaar is, heb ik al goede progressie gemaakt. Ik ben overegens wel er redelijk mee gestopt
Inleiding:
Op deze pagina wil ik graag wat meer vertellen over hoe ik de robot heb gebouwd, maar ook over mijn leerprocessen, uitdagingen en successen. Hieronder staat de opbouw van deze pagina:
De robot
3D-printen en 3D-modellen
De elektronica
Verven
Fotos en filmpjes
De robot:
Het maken van een robot is best een uitdaging geweest. Ik begon eerst met het bedenken hoe de robot eruit zou zien, wat er zou bewegen, hoe ik dat zou doen en hoe ik dat zou maken. Zodra ik een beeld had hoe ik het ging maken ben ik begonnen met 3d-printen en het 3d modellen. Meer informatie daar over staat Hieronder.
3D-printen en 3D-modellen:
Ik ben begonnen met het 3d-ontwerpen in Blender en Tinkercad. Ik heb cura als slicer gebruikt. En mijn printer is een creality ender 3 v2.
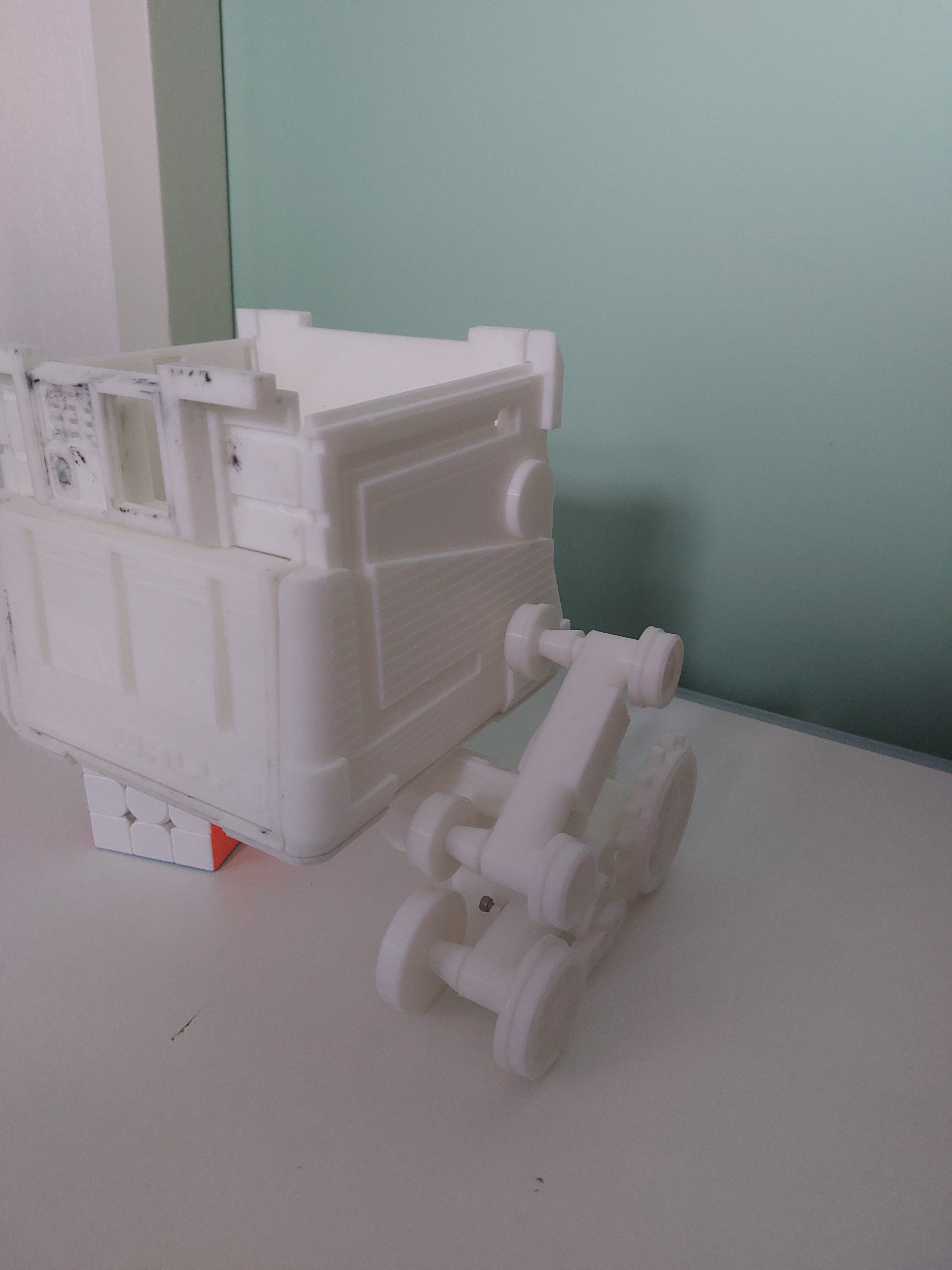
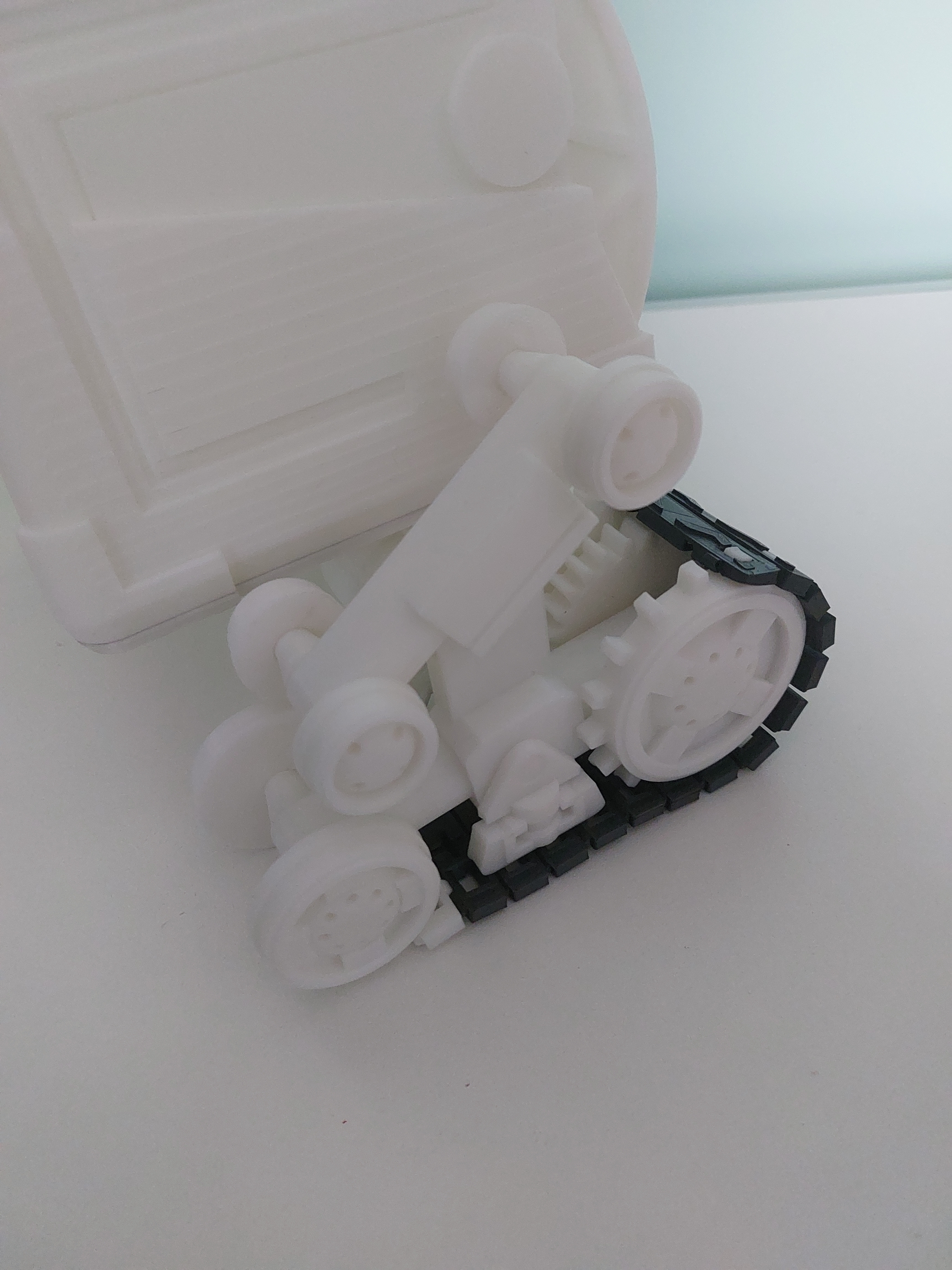
Ik begon met het modellen van Wall-Es doosvormige romp, gevolgd door de rupsbanden, armen en ten slotte het hoofd en de nek. Het koste me wel veel moeite en tijd voordat ik uiteindelijk een resultaat bereikte waar ik trots op was.
Maar ik wil natuurlijk wel dat de robot ook echt gaat bewegen. Eerst kocht ik een robotkit met motoren die ik wilde integreren met de rupsbanden, maar dat ging niet zo helemaal als verwacht.
Ik besloot uiteindelijk een ander moederbord en beter passende motors te in de robot te doen. Met dat moederbordje kan ik meer functionaliteit in de robot brengen. Maar meer daarover onder het stukje elektronica.
Uiteindelijk heb ik nu zeven micro-servomotors en twee DC-motors met een snelheid van 111 RPM. Het moeilijkste was om de motors ook echt begenend en bustuurbaar te maken.
Als je meer wilt weten over het 3d-printen of 3d-moddelen kan je me bereiken via de contact pagina
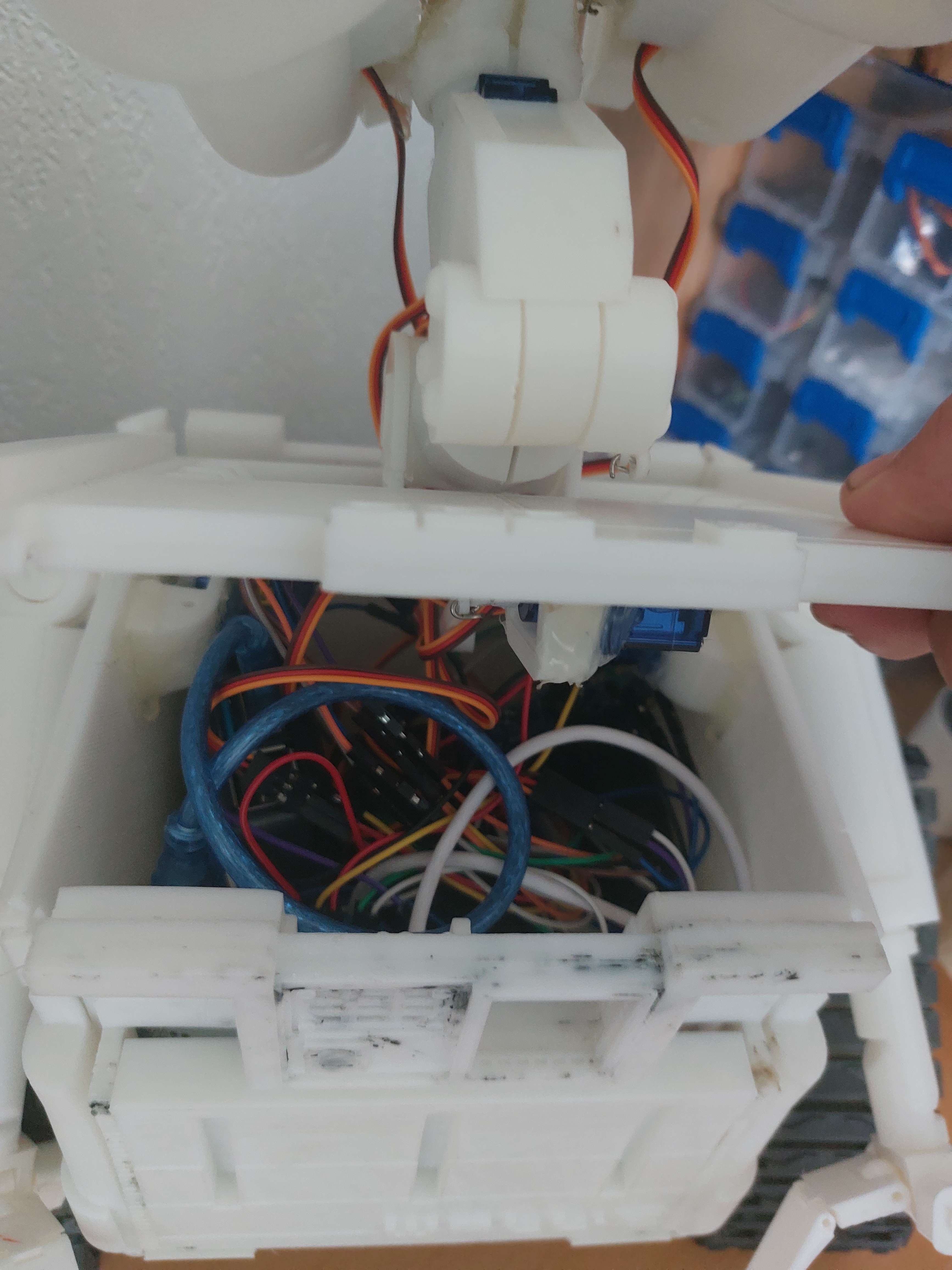
De elektronica:
Voor de beweging in de robot ben ik eerst begonnen met een robotkit uiteindelijk wilde ik wel mijn eigen moederbordje erin doen zodat ik meer mogelijkheden had voor meer motors upgrades en andere leuke dingen.
Ik heb een lijst met alle electronica gemaakt:
Arduino UNO REV 3
Breadboard klein
Powerbank 5v 3A
7x micro servo motor 9g
2x dc motor 111RMP
2x Plano convex lens 32mm
12V loop accu
16-channel 12-bit PWM servo driver
Arduino motorshield R3
Raspberry pi 4 model B 4GB
Uiteindelijk heb ik de raspberry pi op de powerbank aan gesloten de raspberry pi aan de arduino en die weer aan de servo driver voor de servo motors ook zit er een shield op de arduino voor de 12v en de dc motors.
Hoe werkt het:
de Raspberry pi heeft een webserver die vervolgens commands stuurd naar de arduino die dan de motors laat bewegen. Dat is de simpele uitleg voor meer vragen ben ik te bereiken via de contact pagina.
Verven:
Ik heb wall-e geverfed met een airbrush. Daarbij gebruikte ik speciale verf dat is gemaakt voor het spuiten op filament. Ik hem meerdere lagen gespoten. Ik ben van plan om in de toekomst nog een het meer weatherd eruit te laten zien door roest verf maar voor nu ben ik er redelijk klaar mee.
Bedankt voor het lezen van mijn pagina. Ik hoop dat je genoten hebt van mijn avontuur in het bouwen van mijn eigen robot. Als je nog vragen hebt, laat het me dan gerust weten!
Met vriendelijke groet,
Gert Oldenburg